<button id="ywwaa"></button>
<dd id="ywwaa"></dd>
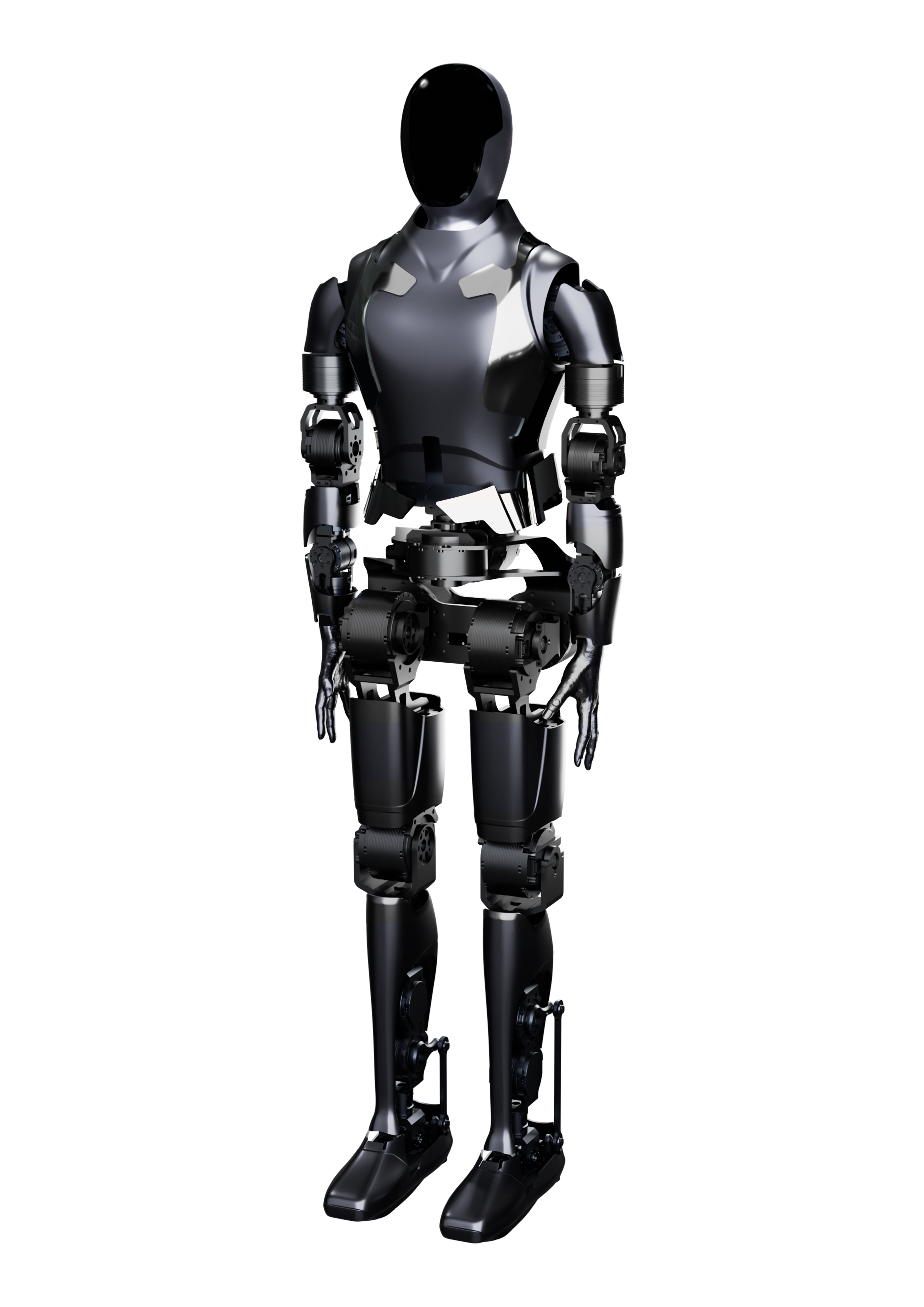
YMbot-F 型工業雙足人形機器人采用全力控關節,本體自由度不少于 40個。末端執行器是仿人五指靈巧手,具有高精度定位和創新設計,可實現精準抓取。通信接口支持二次開發,與 ROS2 協議兼容,提供高層和底層豐富接口。該機器人支持產學研合作的外觀定制與加裝,還能夠集成環境感知交互、運動控制、智能決策等模塊功能以及大語言模型,從而實現自然語言交互。