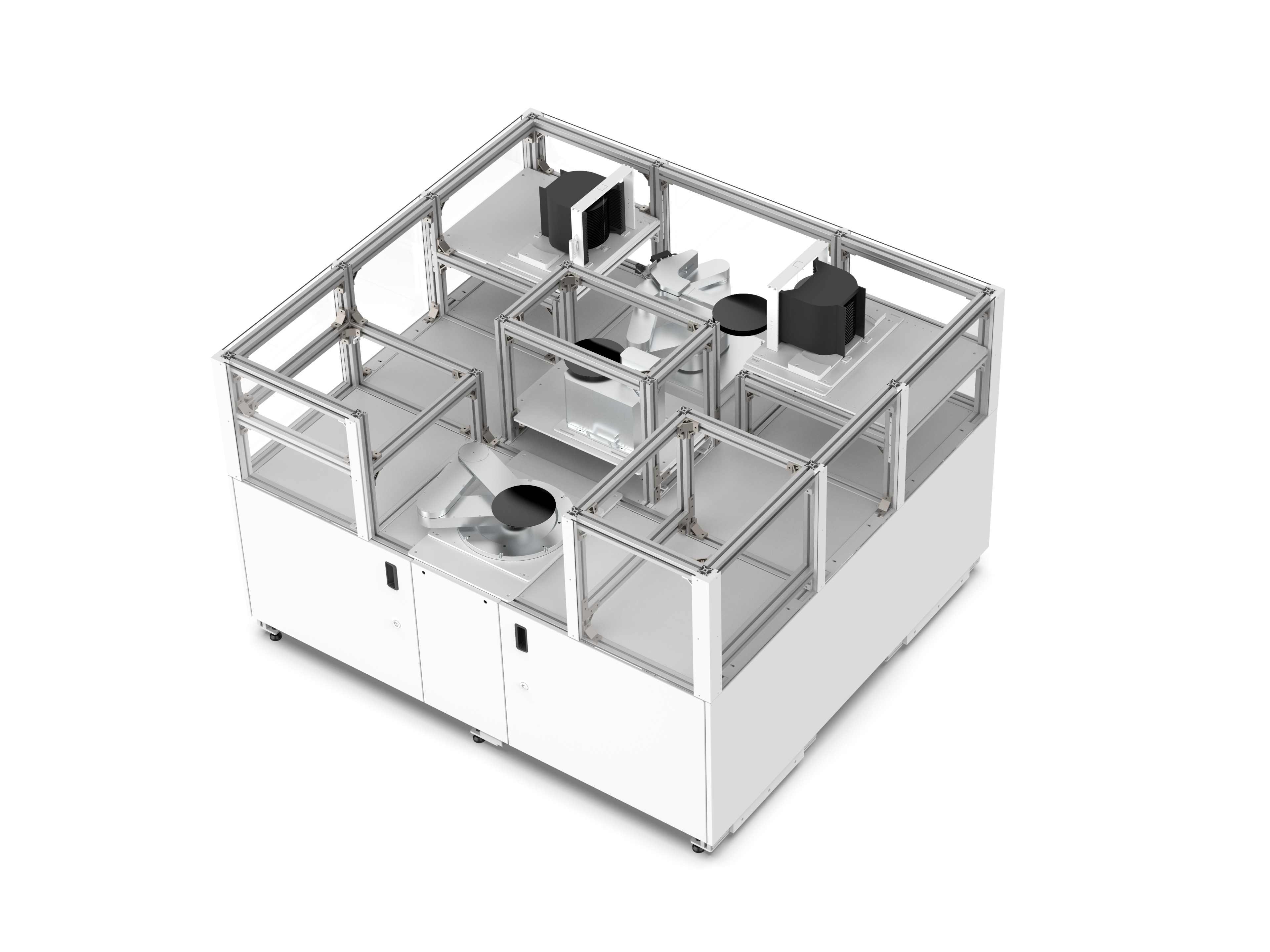
大氣晶圓傳輸機器人采用雙臂式機械結構設計,全軸由伺服電機精準控制。在高速運行時,能夠憑借先進的自研運動學和動力學算法,保持晶圓的高精度傳輸。采用插補控制算法實現VIA功能,可靈活應對復雜傳輸任務;真空晶圓傳輸機器人采用直驅電機進行閉環控制,結合自研軌跡路徑算法,確保晶圓的高平穩傳輸。搭載自動糾偏功能,可實時檢測并糾正晶圓偏差,為半導體制造提供高效、可靠的傳輸解決方案。