-
草莓采摘機器人
由裝備中心熊亞研究員團隊與海淀區農業農村局聯合研發的全自主草莓采摘機器人“柔采(HarvestFlex)” 已實現雙臂連續采摘作業。該機器人100%自主研發,申請14項國內外專利(已授權7項中國發明專利和3項美國專利)。該機器人支持24小時作業,減少過熟損失和微生物污染,已在海淀區示范基地應用,推動草莓產業智能化升級。
查看更多
-
多臂授粉機器人
北京市農林科學院趙春江院士團隊和北京市海淀區農業農村局合作自主研發的“溫室小蜜蜂”多臂授粉機器人主要應用于大型玻璃溫室雌雄同花作物授粉作業,機器人采用了多功能授粉、視覺識別與定位、多傳感器融合導航、路軌兩用自主切換等多種技術,實現了機器人自動導航授粉作業。
查看更多
-
路軌兩用植保機器人
北京市農林科學院趙春江院士團隊和北京市海淀區農業農村局合作自主研發的“溫室小衛士”路軌兩用植保機器人主要應用于大型玻璃溫室垂直種植作物植保作業。 1、多傳感器融合的導航定位技術,實現了軌道切換<10秒,上下軌道成功率99%,定位精度小于3cm;2、智能變量噴霧系統,實現了作業效率1500㎡/小時,噴霧均勻性變異系數<11%。較人工噴藥省工25%、節藥60%。
查看更多
-
番茄采摘機器人
針對連棟溫室番茄生產周期長,果實采收需求大的特點,研發“采-收-運”一體式番茄采摘機器人,具備自主導航、多任務感知、自主決策、避障采摘、柔性擺放、碼垛堆放等功能,實現果實產量巡檢-自動采收-采后轉運全流程自主作業。支持全自主收獲、人機交互和遙控操作多種運行模式,綜合效率達400串/小時,是人工采摘的2倍,綜合性能達到國際先進水平。
查看更多
-
草莓對靶噴藥機器人
草莓對靶噴藥機器人主要用于設施草莓農藥高效噴施,該設備通過視覺傳感器實時探測草莓植株病害信息,通過激光SLAM感知作業環境,自動規劃行走路徑、避障與地頭拐彎。基于病害信息和作業速度進行變量精準噴藥,智能決策對靶噴藥,能顯著節省藥量和提高作業效率。
查看更多
-
基于病害識別的蘆筍風送噴藥機器人
整機采用純電驅動設計,主要有三大功能板塊,①基于機器視覺的蘆筍病害識別模塊,可實時進行復雜環境下作物常見病害的識別、分級,并作出施藥決策,實現基于病害嚴重程度的變量噴藥作業;②基于SLAM的導航模塊,可實現設施環境下自主無人植保作業;③支持風力調節的變量噴霧模塊,噴霧系統設置四個獨立風機,可根據冠層稠密程度調整不同風速,保證藥液霧滴穿透冠層沉積均勻同時,減少漂移,節藥增效。
查看更多
-
根區注入式土壤消毒機
主要用于標準化設施環境或寬壟距田間的土壤消毒作業。作業幅寬可以根據需求進行調節,扎穴機構的高度可以升降,可實現不同壟距和壟高的土壤消毒作業;采用遠程遙控行走的作業方式,作業速度線性可調,作業速度可達1m/s以上;消毒機施藥控制系統中集成有物聯網監測終端,可以實時監測土壤消毒機的作業速度、注藥量和作業面積。
查看更多
-
丘陵果園噴藥機器人
噴藥機器人主要用于丘陵地形果園的高效植保作業, 配備了增程器動力系統和獨立電驅行走系統,可長時間連續作業、無人導航和高精度自動噴藥作業、支持遙控或無人駕駛模式,具備遠程監控和實時數據傳輸功能;可良好適應復雜地形和氣候條件,實現對靶精準施藥,減少農藥浪費和殘留,降低農業生產成本。
查看更多
-
溫室生產巡檢機器人
溫室生產巡檢機器人突破溫室蔬菜多源生境信息動態獲取、長勢判斷決策和自主導航控制等關鍵技術,可實現溫室生產過程的自主及時巡檢,解決傳統人工巡檢頻次高、實時性差的問題。巡檢機器人采用自動巡線導航平臺,搭載“溫-濕-光-氣-視”一體式生境傳感器,可自動停車定點觀測,對植株花序、葉片和果串等目標動態監測。
查看更多
-
純電動旋耕機器人
純電動旋耕機器人以電能作為唯一能量源,采用電機驅動行走和作業部件,集成農機自動駕駛與遠程管控系統,具有智能、環保、高效和維護成本低等特點,適用于設施種養、果菜茶園以及丘陵山地的土地耕整作業。實現決策規劃、路徑跟蹤、地頭轉向、機具操控、聲光報警以及作業統計等功能;續航時間≥6小時,畝均成本≤0.6元。
查看更多
-
激光除草機器人
激光除草機器人通過精準的機器視覺系統與動態激光瞄準技術,實現精準綠色除草。單路激光在0.45秒內即可燒死一顆雜草,而采用8路激光的除草機器人除草速率可達6萬顆/小時,作業效率高。同時,雜草打擊點的識別精度高達94%,確保了精準打擊。獨創的可變光斑執行器可調節光斑大小在1-5mm之間,結合提出的橫擺激光打擊模式,有效克服了激光定位誤差,從而進一步提高了除草的精準度和效果。
查看更多
-
牛羊體重體征智能測定分群裝備
牛羊體重體征智能測定分群裝備是專為牛羊規模養殖場研發的一體化智能管理設備,在牛羊經過低應激通道時,開展RFID個體識別、稱重和體征(主要包括體高、體長、體寬、臀寬、臀高等)數據自動采集、分析及智能化決策,驅動電控高效分群,輔助養殖場及時把握料肉比和動態調群,實現牛羊群體精細化管理和個性化服務。
查看更多
-
種蛋多品質無損測定裝備
開展一體化便攜裝備機構設計,發開發嵌入式控制系統、數據采集系統和可視化人機交互GUI,對種蛋外部(裂紋、臟污、暗斑、畸形等)、內部(受精、活性、異物、性別) 開展檢測算法研究,形成了種蛋孵化品質無損測定裝備,實現種蛋自動翻轉,多角度品質參數高通量獲取與測定,結構緊湊,便于攜帶。檢測時間≤8s;蛋重誤差≤3%;畸形蛋準確率≥90%;裂紋蛋準確率≥90%;臟污蛋準確率≥90%。
查看更多
-
低產雞巡檢機器人
研發了雞舍原位轉向底盤,采用兩輪差速驅動、高精度地磁傳感,實現精確定位、自主導航和動態避障;開展種雞/種蛋多特征識別算法研究,基于雞冠/臉特征、顏色、產蛋數量、產蛋質量等多特征,構建了低產種雞、異常種蛋(臟/血污等)識別算法,實現種雞產能原位檢測;巡檢速度4-6米/分鐘;臟污蛋識別精度≥91.2%;血污蛋識別精度95.1%;區位產蛋檢測準確率≥92.7%。
查看更多
-
豬只無針免疫注射機器人
開展針對豬舍實際場景下機器人底盤導航技術研究,臀部注射點位姿識別與機械臂最優控制算法研發,實時獲取臀部區域注射點位姿信息,控制注射器以最優路徑到達注射點。集成運動底盤、視覺傳感單元、機械臂系統、無針注射單元、中央主控單元,形成豬只無針免疫注射機器人,實現精準圈舍定位、生豬臀部跟蹤及無針垂直注射等操作,減少人工干預,提高工作效率與安全性。
查看更多
-
豬/牛/羊體尺高通量無應激測量設備
面向一線豬/羊養殖中體尺參數測量需求,提供集約化解決方案,一站式實現豬/牛/羊體高值、體寬值、體斜長、胸圍值、腹圍值等參數的自動計算,采用非接觸式測量方式,80毫秒內實現電子耳標讀取,整體測量時間在2秒內完成;數據自動存儲,具有較高的魯棒性,體尺測量綜合準確度達到95%以上。已在四川、北京、云南推廣應用。
查看更多
-
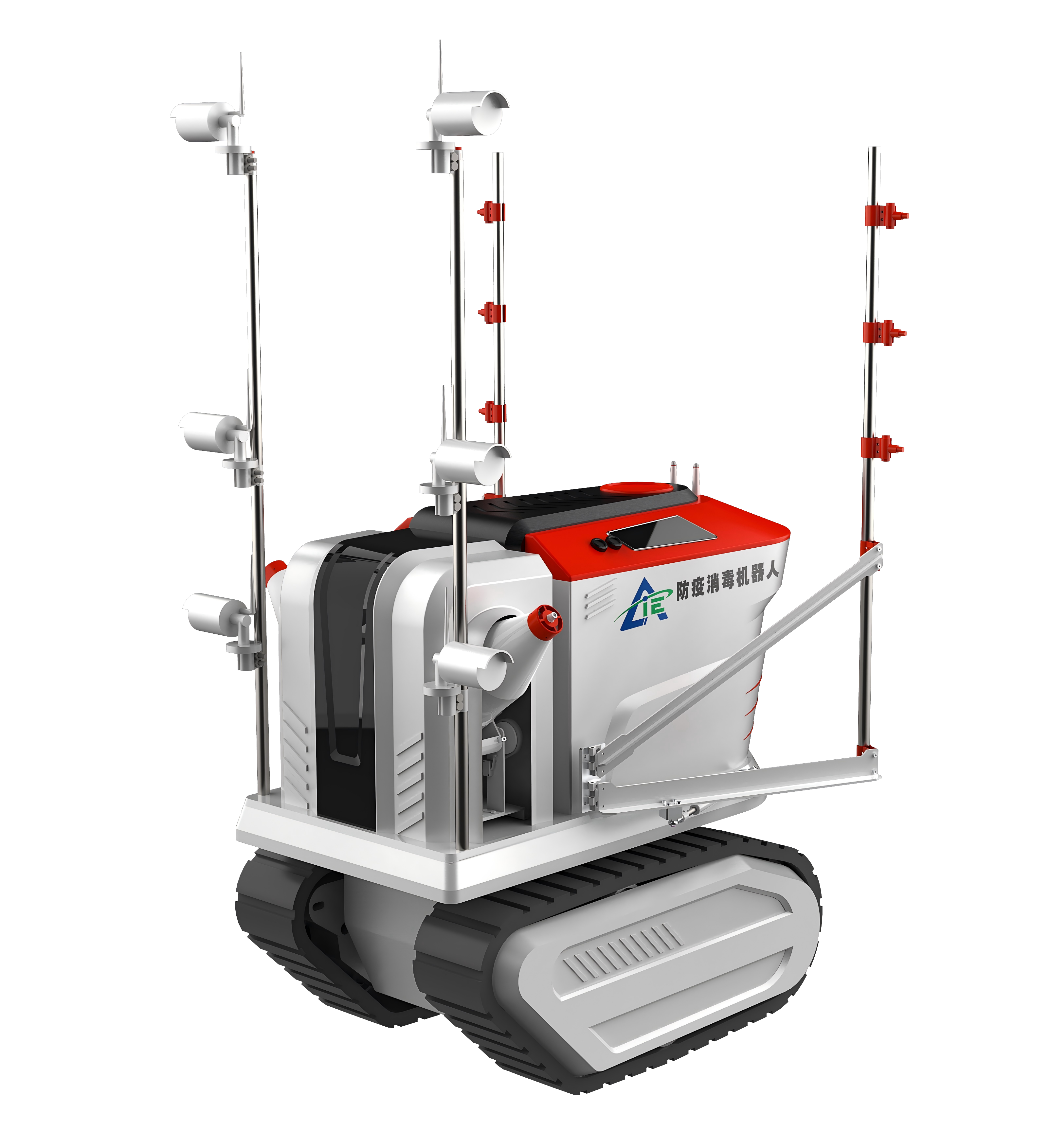
免疫消毒機器人
創制防疫消毒無人化作業模式與裝備,可實現畜禽舍內消毒液和免疫試劑的精準噴霧、養殖舍自動導航移動、作業信息物聯網遠程監控。機器人根據指令可自動進行定點、定量、定時噴霧,同時可對養殖舍內氣體、溫濕、粉塵等進行遠程監測。已在北京、江蘇和重慶等多地示范應用。
查看更多
-
景觀式水質在線監測平臺
配備高精度的傳感器陣列,能夠對水中的多種關鍵指標進行快速、準確檢測。包括酸堿度(pH)、溶解氧、電導率,到氨氮、化學需氧量(COD)等污染物濃度(可定制),均可實時監測。檢測數據通過無線傳輸技術,實時上傳至監控平臺,用戶可通過手機、電腦隨時查看水質狀況。搭載先進的自發電技術,可全天候穩定運行,配備了風力發電裝置,實現能源的多渠道獲取。
查看更多
-
蝦蟹AI水產自動分選機
基于機器視覺技術,結合在線自動稱重功能實現對螃蟹的自動分級分選。可用于大閘蟹的公母、重量、殘次、顏色等品質特征的分選;基于大數據算法對螃蟹等級品質進行分選的AI智能分選機,屬于國內首臺首套產品,可用于各大水產型分揀中心及其它大型水產分揀場所,為螃蟹在銷售過程中的市場定價提供關鍵性依據,適用于養殖戶售賣給商販過程中的等級品質分選和商販對電商及終端用戶進行二次銷售的等級品質分選。
查看更多
-
農產品多臂柔性快速包裝機器人
是一款針對類球形農產品(蘋果、西紅柿、大桃等)進行快速自動化精準裝箱作業的機器人設備,具有全自動視覺輔助進料、果梗/花萼識別定位、箱體放果位置識別、多臂協同抓取包裝、觸摸屏顯示操作界面、包裝數據統計、遠程監控等諸多功能。該機器人包裝設備集空箱輸送、物料輸送、自動裝箱、滿箱輸送、封箱為一體,也可以與貼標、打碼、稱重等其他包裝系統配合。
查看更多
-
電驅氣力式精量播種機
融合基于FOC的電驅精量排種、電液驅動變量施肥、播種施肥作業監測和基于CAN總線的種肥一體化智能控制技術,創制的高性能智能化電驅氣力式精量播種機。
該機型具有作業速度快、作業質量好、智能化水平高的優點。可實現12km/h高速播種作業,較傳統播種機作業效率提高20%以上,粒距合格指數提升5%以上。適用于玉米、大豆、蓖麻、高粱等中大籽粒作物免耕、少耕和耕整地播種作業。
查看更多
-
多臂蘋果采摘機器人
針對果園智能化高效采收需要,國內首創“采-收-運”一體式果園多臂采摘機器人,重點突破自然環境熟果視覺識別、剛柔耦合采摘臂設計、多臂協同作業任務規劃等關鍵技術,有效提高了采摘機器人信息感知、柔順操作與高效作業性能。
適用場景:矮化密植標準蘋果園
查看更多
-
大田對靶噴藥機器人
整車采用線控底盤,大功率四輪獨驅獨轉線控底盤,增加了車輛的機動性和敏捷性。底盤系統采用線控技術,配備先進的電子控制單元(ECU)和傳感器來實現精確的驅動和轉向控制。機器人配備了先進的定位和導航系統,可以在大田環境中進行準確的定位和路徑規劃。行內導航行走精度<±5cm,行端轉彎半徑5.2m ,入行偏差<9.5cm。
查看更多
-
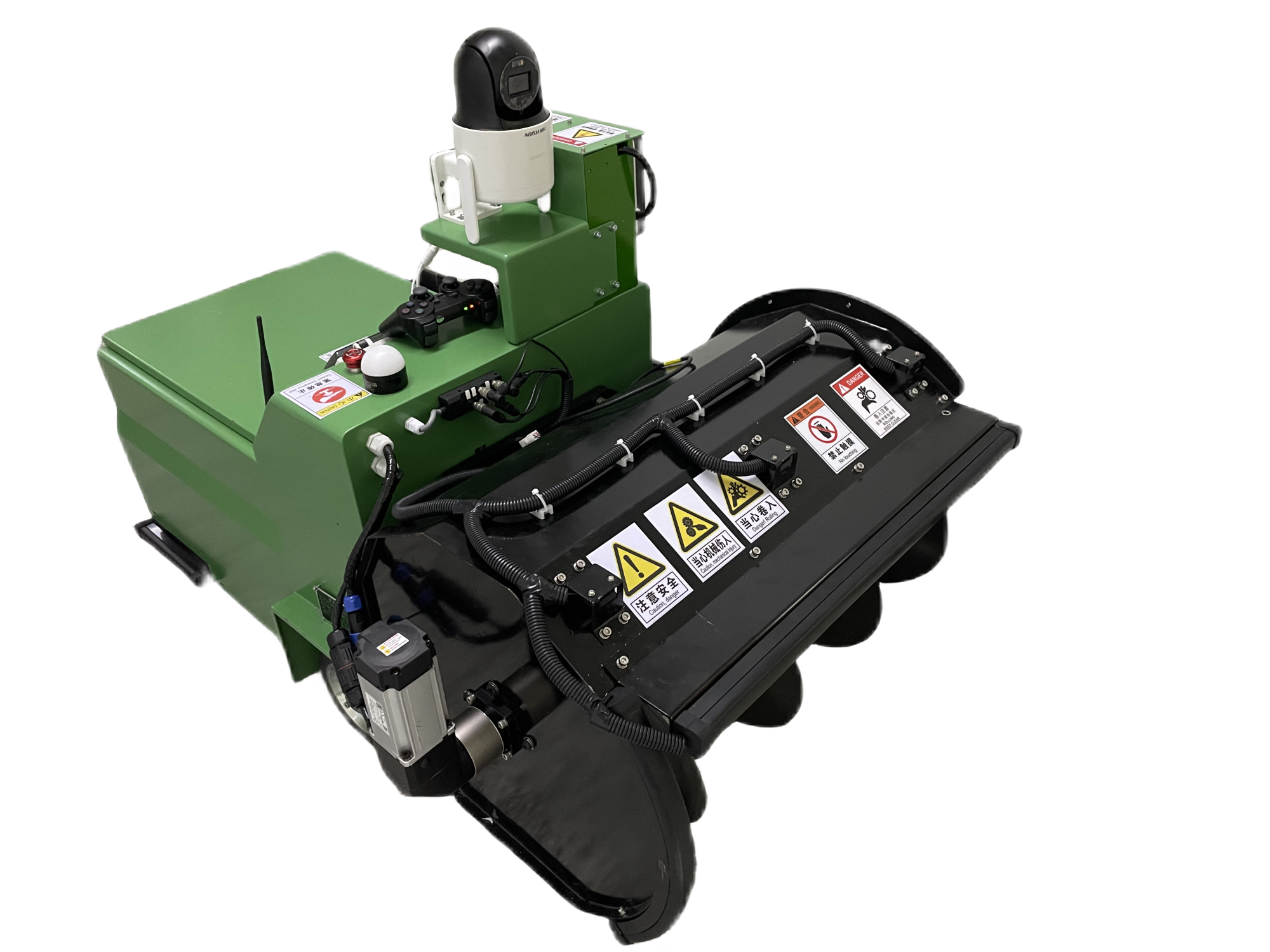
牛舍智能推料機器人
該產品由運動底盤機架、人機控制系統、導航避障系統、雙螺旋推送機構、充電系統等部分組成,突破了智能推料方法、螺旋輸送機構有限元分析、推料效果仿真等技術,實現了規模化牛舍無人自動高效推料,獲得國家發明專利授權,通過農業農村部機械化總站官方檢驗鑒定,先后在新疆、青海等地開展了實踐推廣。牛群采食量可提升2%-3%,剩料率由3%-8%下降至2%-3%。
查看更多
-
畜禽健康巡檢機器人
面向結構化畜禽舍,能夠全自主作業實現畜禽健康巡檢。機器人采用多路圖像傳感同步采集處理技術,深度學習算法,機器人技術等智能識別蛋雞舍死雞和弱雞,并標記異常位置和數據無線傳輸上云。已在河北、北京、江蘇等規模化蛋雞養殖場應用,異常畜禽識別率達到98%以上,替代人工效率80%以上。
查看更多
-
車載果托式小尺徑果蔬品質分級生產線
以小型拖車為載體,靈活拖動自由果托式果蔬品質無損檢測分級生產線實現移動式檢測,車載果托式分級線采用柔性果托防止果實檢測運輸過程損傷,采用動態精密稱重技術、近紅外光譜檢測技術為基礎,分析獲取果實重量、糖度和內部缺陷等多品質參數,實現果實品質快速無損分級。檢測對象包括西瓜、柑橘、蘋果、番茄、桃、梨、獼猴桃等不同大小的果蔬。
查看更多